


Detection range is the traditional manner in which the performance of thermal cameras is measured. This makes sense as operators would like to know how far can they see or detect a vehicle or a man in poor visibility. In practical terms, things are not that simple.
Detection range is the traditional manner in which the performance of thermal cameras is measured. This makes sense as operators would like to know how far can they see or detect a vehicle or a man in poor visibility. In practical terms, things are not that simple.
An often neglected factor is the problem high dynamic range scenes cause. Even if the system can resolve the target, it can not be displayed to the user unless the user knows exactly within what part of the signal span the target is hidden. This will increase the time to detection significantly or even worse: it will let certain events go undetected.
Flir Systems has developed an algorithm that helps the user overcome the problem of finding low contrast targets in high dynamic range scenes. This algorithm is called digital detail enhancement (DDE). DDE is an advanced non-linear image processing algorithm that preserves details in high dynamic range imagery. This detailed image is enhanced so that it matches the total dynamic range of the original image, thus making the details visible to the operator even in scenes with extreme temperature dynamics.
Why is high dynamic range a problem?
The answer lies in the limitations of the human visual system and in the limitations of typical video interfaces. A human observer can distinguish only approximately 128 levels of grey (7 bit) in an image. The challenge for each IR-camera is to map the information hidden in a 14 bit signal (>15 000 levels of grey) to a 7 bit signal a human observer can distinguish. In addition many analogue and digital video interfaces require 8 bit values which effectively limit the dynamic range to 256 levels of grey, even if the end user is not a human.
Is not DDE just histogram equalisation?
Histogram equalisation (HE) and the many variants of it work by the paradigm of ‘more dynamic range (contrast) to the dominating temperature range and less dynamic range to image areas in the non dominating range’. DDE on the other hand simply enhances all details equally, regardless of the temperature range that they happen to be in. This means a small hot object against a cold background will have as clear details as the background that happened to represent the dominating temperature range.
Comparing linear AGC, HE and DDE using a theoretical five targets (DT 200 mK) image. In these three images, five sets of bar targets are hidden. Each target has approximately 200 mK higher temperature than the background.
A standard AGC algorithm would not improve the image (Figure 1). The image shown in Figure 2 is enhanced using Histogram equalisation. As predicted, only the centre target can be observed as it happens to be in the dominating dynamic range of this scene.


Using FLIR Systems’ DDE algorithm (Figure 3) all five targets can be observed simultaneously. Also all five targets have the same contrast regardless of how many pixels happen to be in that particular part of the dynamic range. This is what makes DDE effective and predictable regardless of how the scene changes.

Traditional AGC algorithms remove extreme values and linearly map dynamic range onto an 8-bit domain. This will help very little in high dynamic range video. Histogram equalisation increases contrast in the dominating temperature/irradiance range. What if target is not in that dominating range? DDE gives a predefined portion of available contrast to details. The probability of detection of low contrast objects is constant over the image.
This video sequence shown in Figures 4 to 7 shows a scene with fairly high contrast. Gain and level have been adjusted manually in Figures 5 and 6 in order to point out special low contrast targets.



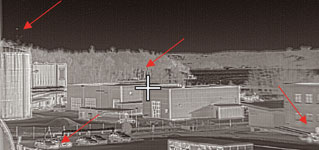
Figure 4 shows the video signal after a standard AGC algorithm has been applied. The algorithm will truncate the signal omitting the extreme pixels which gives more contrast to the centre part of the histogram. A moving target can easily be observed.
Figure 5 shows the low end of the signal span and we can now detect a helicopter hovering in the upper left corner of the image. This could be the potential target. Note that the helicopter is not visible in Figure 4.
Figure 6 now shows a narrow span in the middle of the dynamic range. We can now see pixel-sized targets in the woodlands across the strait of water. What if these people were actually the targets?
Finally, Figure 7 shows the sequence filtered using Flir’s DDE Algorithm. Now all three targets can be observed simultaneously. As can be seen, there are very few artifacts in the image.
Acknowledgement to Flir – Technical Notes
For more information contact Tinus Diedericks, Timeless Technologies, +27 (0)21 914 6144, [email protected], www.timetech.co.za


© Technews Publishing (Pty) Ltd. | All Rights Reserved.
 printer friendly version
printer friendly version